Mi az az ipari buszrendszer?
Az ipari buszrendszer egy olyan kommunikációs infrastruktúra, amely lehetővé teszi ipari eszközök (szenzorok, aktuátorok, PLC-k, HMI-k) közötti adatcserét.
A klasszikus párhuzamos vezetékezés helyett egy közös kommunikációs csatornán (buszon) történik az adatátvitel.
Miért volt rá szükség?
- ✔ Vezetékezési költség csökkentése
- ✔ Gyorsabb adatátvitel
- ✔ Diagnosztikai lehetőségek
- ✔ Skálázható rendszerek
- ✔ Ipari zajállóság
Hogyan kommunikálnak ezek a rendszerek?
Master – Slave modell
A master (mester) vezérli a kommunikációt, a slave (szolga) eszköz csak válaszol. Például: PLC (master) → szenzor (slave).
Client – Server modell
Hálózati alapú rendszereknél alkalmazott modell, ahol a kliens kér adatot a szervertől.
Serial Communication
Soros adatátvitel esetén az adat bitről bitre halad. Gyakori jelek:
- 🔹 SDA (Serial Data)
- 🔹 SCL (Serial Clock)
- 🔹 TX / RX
Fontos ipari és terepi buszrendszerek részletes bemutatása
I2C (Inter-Integrated Circuit)
Az I2C egy rövid távolságra tervezett, kétvezetékes soros busz. A kommunikáció két vonalon történik:
- SDA – Serial Data
- SCL – Serial Clock
Master–Slave elven működik. A master generálja az órajelet, ő indítja a kommunikációt és címzi meg a slave eszközöket.
Minden slave egy egyedi 7 vagy 10 bites címmel rendelkezik. Az adatcsomag tartalmaz:
- Start bit
- Cím
- Read/Write bit
- Adat bájtok
- ACK/NACK visszajelzés
- Stop bit
Előny: egyszerű vezetékezés, több eszköz egy buszon. Hátrány: rövid távolság, zajérzékenység.
UART (Universal Asynchronous Receiver-Transmitter)
Aszinkron soros kommunikáció. Nem használ külön órajelet. Az adatátvitel baud rate alapján történik (pl. 9600, 115200 bps).
Jelek:
- TX – Transmit
- RX – Receive
- GND
Az adatkeret tartalmaz: start bit, adatbitek (általában 8), opcionális parity bit, majd stop bit.
Gyakori mikrokontrolleres kommunikáció (Arduino – Raspberry Pi).
CAN bus (Controller Area Network)
Differenciális jelátvitelt használ (CAN_H, CAN_L), ezért nagy zajállóságú ipari és autóipari környezetben.
Nem klasszikus master-slave rendszer. Minden csomópont képes adatot küldeni. Arbitration mechanizmus dönti el, ki kommunikálhat.
A prioritás az üzenet azonosítójától függ. Alacsonyabb ID → magasabb prioritás.
Beépített hibadetektálás:
- CRC ellenőrzés
- Bit stuffing
- Error frame
Tipikus alkalmazás: autóipar, ipari robotika, mozgásvezérlés.
Modbus (RTU / TCP)
Egyszerű, iparban széles körben alkalmazott protokoll. Master–Slave alapú működés.
Modbus RTU → soros (RS-485)
Modbus TCP → Ethernet alapú
A kommunikáció regiszterek olvasásán/írásán alapul. A master kér, a slave válaszol.
Ipari PLC-k, frekvenciaváltók, HMI rendszerek használják.
Profibus
Determinisztikus ipari busz. Siemens fejlesztés.
Fizikai réteg: RS-485. Gyűrű vagy busz topológia.
Időkritikus rendszerekben használják, mivel garantált válaszidőt biztosít.
Profinet
Ethernet alapú ipari kommunikáció. Valós idejű adatátvitelre képes.
Előnye:
- Nagy sebesség (100 Mbps+)
- IT rendszerekkel kompatibilis
- Diagnosztikai lehetőségek
SCADA
Supervisory Control And Data Acquisition rendszer.
Nem maga a fizikai busz, hanem egy magasabb szintű felügyeleti rendszer, amely gyűjti, naplózza és megjeleníti az adatokat.
PLC → Terepi busz → SCADA szerver → Operátor
I2C és HTTP kommunikáció
I2C kommunikáció
Az Arduino slave módban működik (0x08 cím), a Raspberry Pi pedig master.
Wire.begin(SLAVE_ADDRESS); Wire.onRequest(requestEvent);
A Raspberry Pi oldalon:
data = bus.read_i2c_block_data(ADDR, 0, 8)
temp, press = struct.unpack('ff', bytes(data))
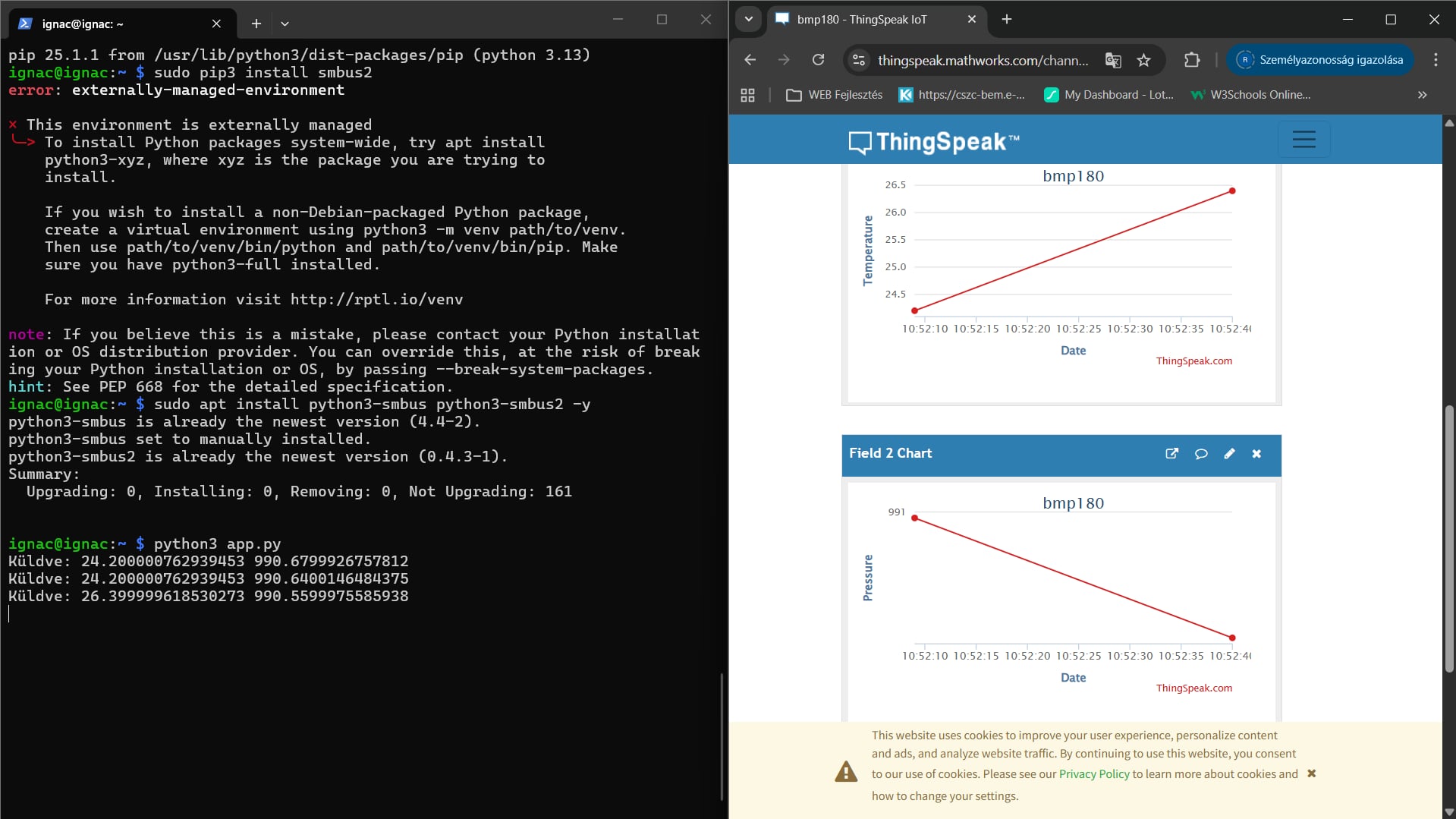
HTTP adatküldés ThingSpeak-re
payload = {
"api_key": THINGSPEAK_API_KEY,
"field1": temp,
"field2": pres
}
requests.post(THINGSPEAK_URL, data=payload)
A rendszer 15 másodpercenként küldi az adatot, a rate limit betartása miatt.
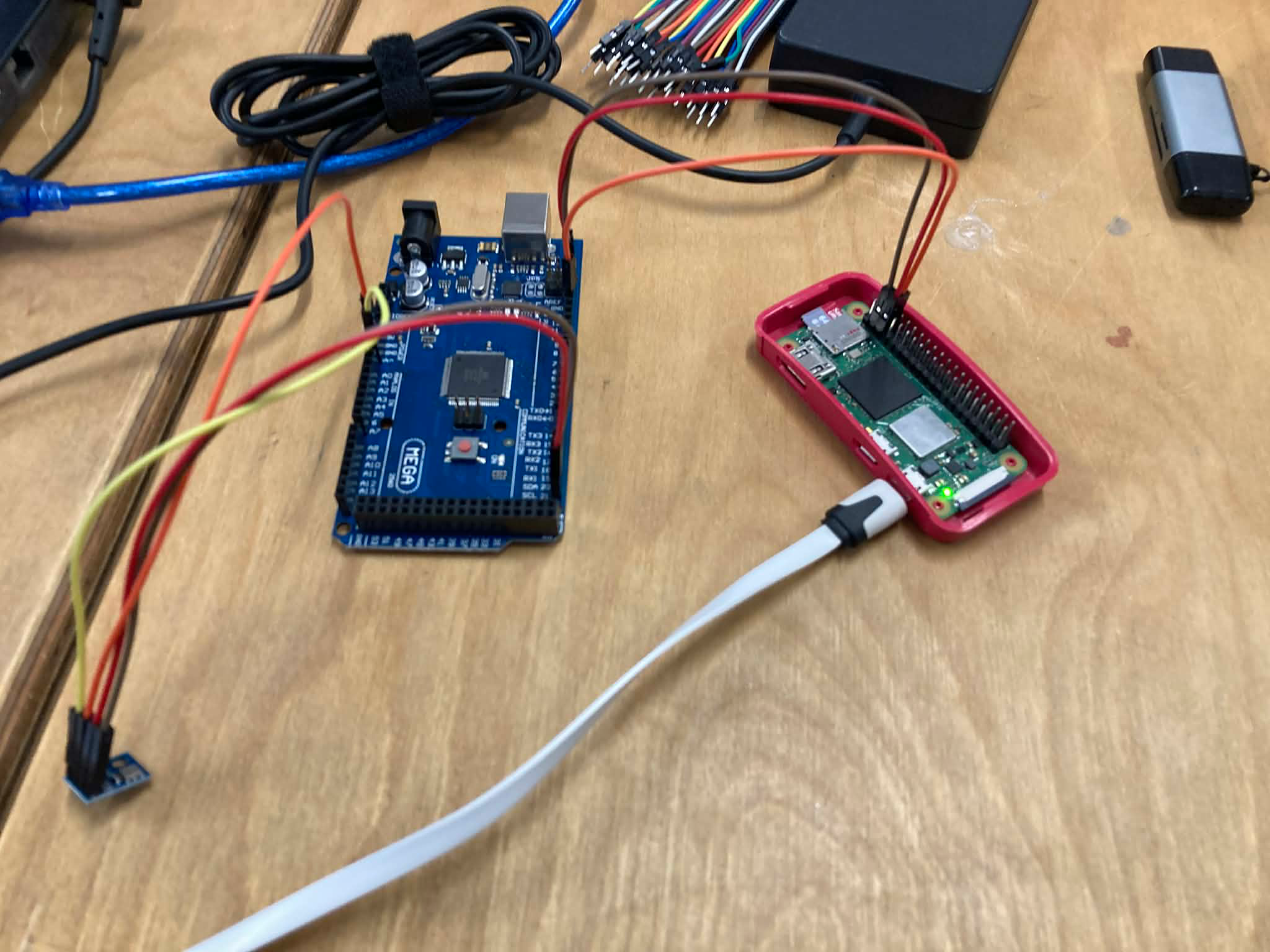
BMP180 Szenzor alapú IoT rendszer
A BMP180 szenzor méri:
- 🌡 Hőmérséklet
- 🌡 Légnyomás
A mért adat:
Arduino → I2C → Raspberry Pi → HTTP → ThingSpeak Cloud
Mit tanultam?
- ✔ Kommunikációs modellek működése
- ✔ Ipari protokollok közötti különbségek
- ✔ Master–Slave rendszerek logikája
- ✔ Soros és Ethernet alapú kommunikáció
- ✔ Diagnosztikai szemlélet